ICS复习¶
x86-64汇编¶
Lecture 2 Machine-level Programming I: Basics
对以上记录先进行评述:¶
1.结构体之中的内存对齐,每个结构体成员的首地址是其大小的整数倍,结构体首地址是其成员最大的那个类型的整数倍;
- 指令集架构
是硬件和软件的界面,指令,数据类型(x86-64的整型8位、16位、32位、64位),寄存器堆,寻址模式;
寄存器中特殊的寄存器:RSP(储存当前栈顶地址,ret,call等指令时有用),RIP(PC指向下一条指令的地址),x86-64有16个通用寄存器。
x86-64的操作数包括寄存器类型、内存地址类型(由寄存器存入的地址确定),立即数;
我顺带复习了CPU体系中的顺序CPU指令,有一些指令是2字节指令,首字节的前4位是instruction code 向CPU说明该指令的类型,后四位是function code,具体指示该指令的功能;接下来一个字节前4位是S寄存器,后四位是D寄存器;
从汇编层面上来看,操作包括:move,基本运算和位运算,比较运算;jump和ret(其中包括了栈操作)
汇编代码中的寻址模式:直接寻址:(%rsp),基址寻址 : 8(%rsp), PC相对寻址:0x2323(%rip); index+base寻址 : (%rdi,4)
一个可能作为考点的指令?¶
leaq S,D(其中S是地址的计算,D指示计算后值的存储寄存器)
leaq (%rdi, %rsi, 4), %rax ; RAX = RDI + RSI*4(用于数组索引计算)
//地址计算的括号前还可以加上偏移量
Machine programming 控制部分¶
- 自主回忆
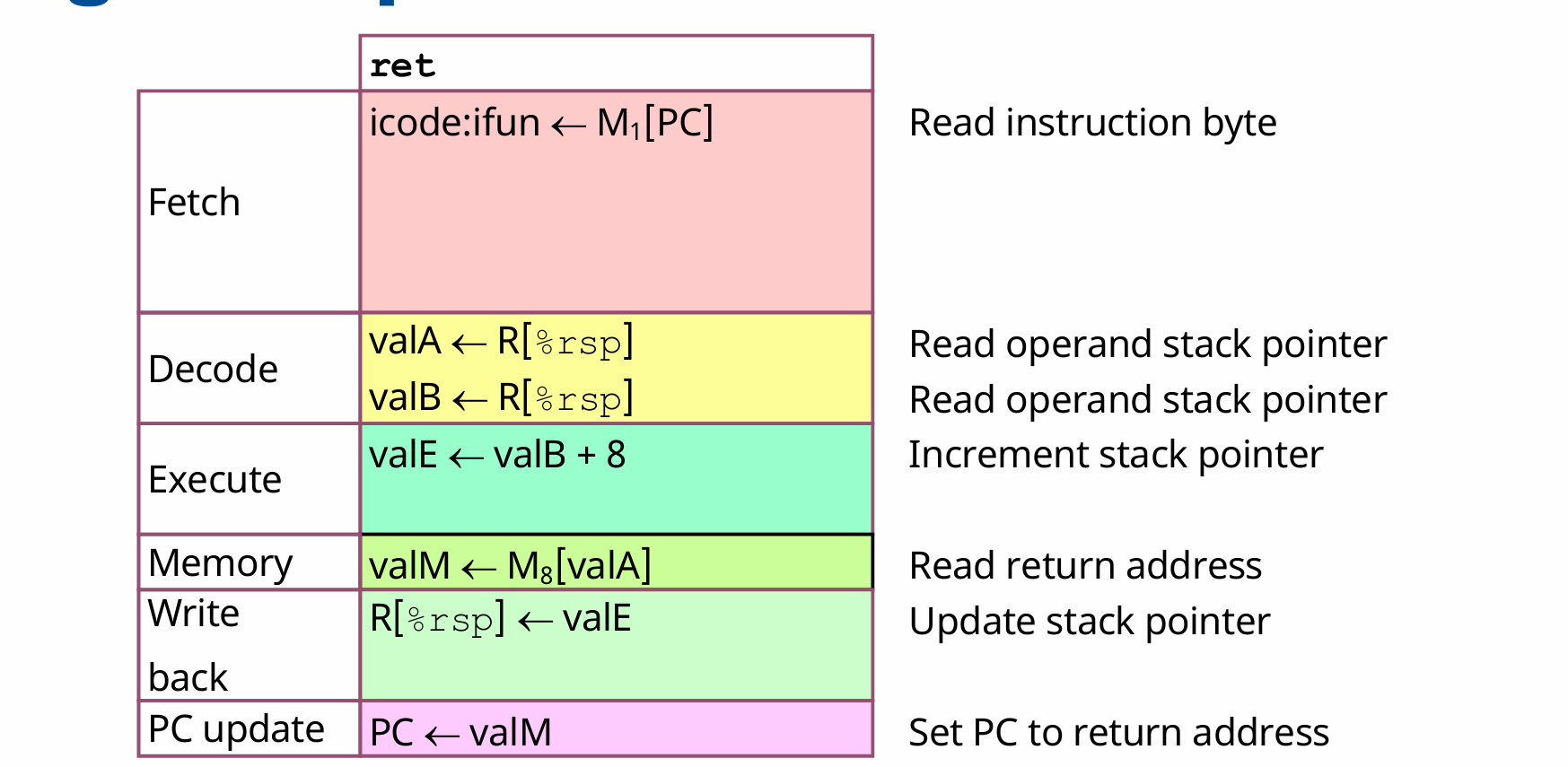
在汇编中,程序的非顺序执行是由一些指令如jmp,ret,call来完成的,这两个指令是无条件跳转的,jump指令和call指令本身带有跳转的地址,而ret指令比较特殊,它的完成是由以下步骤完成:
同时CPU当前的状态可以反映在条件码上,条件码是经过基本运算后会被隐式地操作,比如addq ,subq ,等指令;还有两个指令test (相当于与操作,但不改变D寄存器的值);cmp a,b (相当于b-a,同样不改变b的值),但是会在过程中设置条件码。
还有一些指令是根据条件码进行操作的,比如setx ,它操作寄存器的最低字节但不改变其他,同时还有一个指令movzbl 这个指令将单字节扩展到2字,即32位,将多出来的三个字节全部置零;这里还有一个隐藏的操作,就是在64位机上,如果操作了eax等32位寄存器,会将高位的32位全部置零。
还有一些指令是根据条件码进行操作的,比如je, ja,jb(针对unsigned),jg,jl(针对signed)
条件跳转¶
在c语言等高级语言上实现的if,else 在汇编上通过jmp,jl,等实现;程序此时不再是顺序执行的,而是出现了非线性的情况,有两条可能的路径,所以一旦CPU在分支预测上出现错误,它就必须重新执行;
如果两条分支的功能不复杂,比如是一个单指令操作,完全可以通过条件转移(condition move)来实现,即同时执行两条路,再判断,然后选择结果。这样的好处是规避了分支预测错误的惩罚,但是不适用于那些在两条分支有复杂的逻辑,或者两条分支共同操作同一操作数的场景。
循环的实现¶
循环的本质是跳回之前的代码;可以用goto来等效实现;
将循环的代码标注为loop代码段,do-while本质上实现了
loop:
body
test:if()
goto loop;
else
return;
而for或者while语句也可以通过翻译为do while来实现
switch case的实现¶
有两种实现方式,第一种是直接跳转。首先,各种case可以看做是不同的代码块;这些代码块可能有一些特殊情况,比如直通,或者是重复使用某一代码块,直通可以在代码块间使用jump来实现;重复就更简单了;
另一种是间接跳转,存在一个跳转表,在rodata段,它类似于一个地址数组,需要先获得跳转到哪条地址;
函数调用和栈操作¶
几个特殊指令:call ret
栈的两个基本操作push和pop 注意栈向低地址方向增长;即push时栈顶指针减,pop时栈顶指针加
call :该指令提供被调用函数的地址,用这个地址更新pc,同时压栈,把该指令的下一条地址压入栈中;
ret: 该指令与call进行相反的操作,先从栈中弹出来地址(8字节)更新rip寄存器(PC);
如何传参¶
对于x86-64,前6个参数由寄存器传;如果有放不下的(结构体)或者参数过多的,就压入栈中进行传参;特殊地,一般由rax寄存器来传函数的返回值;
传参的过程发生在call指令之后
内存管理¶
由于计算的结果一般传在通用寄存器上,而寄存器又是各函数公用的;所以有caller和callee两种维护局部变量的方式;一般rax,rdi等大多数通用寄存器都是caller save;而rsp,rbp,rbx,r12等少数几个寄存器是callee save的;
递归¶
在汇编层面上递归的实现并不特殊
只要通过一个call myself 就可以实现;但要避免无法跳出导致栈溢出
machine programming 数据¶
数组的实现¶
1维数组:比如1个字符串;如果它是作为局部变量的话,它的创建过程是rsp-sizeof array;然后再向其中逐字节写入,从栈顶开始写;
如果我要访问整型数组的一个元素:汇编层面是:base+index*s;
leaq (%rdi,%rax,4), %rsi;
在C语言中,变量名就是该数组的首地址,可以作为参数传入;
二维数组:本质上也是一片连续的内存空间,其又可以理解成数组的嵌套;
比如一个数组 a[3][4];假设是行先序;在内存中的排列是几个行向量的连续排列,也就可以理解为行向量的数组,即
typedef int MYTYPE [8];
MYTYPE xjtu[4]={{1,2,3,4,5,6,7,8},{1,2,3,4,5,6,7,8},{1,2,3,4,5,6,7,8},{1,2,3,4,5,6,7,8}};
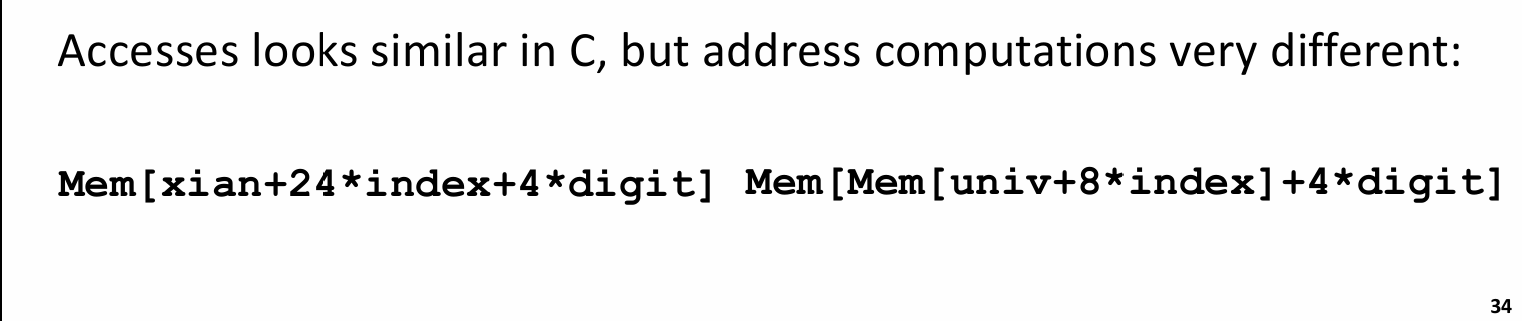
在汇编层面,访问二维数组的操作可以看做访问这样一个嵌套数组,即先获取内部数组的大小,再作为leaq指令中的比例因子;比如上面这个例子中内部数组的大小为8*4=32;那么可以使用leaq (base,index,32)来访问某一个行向量,再对这个行向量进行类似于1维数组的操作,就可以获得所需要的数组元素;
在逻辑上,访问二维数组a[3][4]的元素a[i][j],就是访问地址a+i4sizeof(data)+sizeof(data)*j;
结构体和字节对齐¶
编译器会为结构体各成员安排一个固定的偏移量,并且为结构体固定一个大小,这个大小和结构体的首地址都是结构体最大成员的大小的整数倍;结构体各成员的地址也是sizeof(data)的整数倍,但要注意,数组成员的大小是其元素的大小而非整个数组的大小;
栈溢出的风险和应用¶
栈溢出的风险,攻击:面向返回值的攻击和缓冲区修改;
缓冲区:修改返回地址,或者将返回地址改为栈上地址,再在栈上执行代码;
面向返回值:利用代码区中与c3(ret指令)接近的机器码,可以构造出一条不断执行的链条,并利用其为函数调用准备参数,最后进行函数调用;
也可以利用以上的两个漏洞使函数执行出一些意想不到的结果;
计算机存储结构¶
在计算机CPU主频不断提高,有效CPU周期不断降低时,DRAM与CPU的gap不断增大;出现的新技术SRAM等单位内存又价格更高;
构建一个存储结构,为一个金字塔形,从最底下容量最大、速度最慢的硬盘到DRAM再到三级缓存,再到寄存器;在容量更小的同时,速度更快;上面的一层是下面存储结构的子集;上面也可以叫做下面一层的cache,这是广义的cache.
Cache¶
为了补齐gap,现代计算机普遍都有3级cache,L1分指令和数据,L2L3均为通用,L3为多核公用;
-
怎么读?
最优情况(但因为硬件电路限制难以实现)全相联,只用一个set,放有n个大小的block,每个内存块之间用tag区分;这种情况避免了conflict miss 的出现;具体来看,假设实际内存有6位,即主存总大小为64 byte,16 byte 的cache 大小,且每个block大小为4字节,那么就需要4个block,各组通过tag位加以区分,每次读取时,先判断是否valid,再判断tag是否匹配;两个条件均满足就是hit,否则miss.注意硬件电路实现的是并行比较和判断,这也就解释了为什么全相联难以实现,即需要比较16个block的tag和某个值;
最差情况(direct-map),还是已知64byte的主存大小,16 byte 的cache 大小,且每个block 4个byte,那么总共就需要4组(16/4),那么一个内存就可以被分为前两位(Tag),中间两位(index),剩余两位(offset);在读取时,先找set是哪个,再比较tag和valid,最后根据offset拿到具体的内存地址上的值。
折中方案:多路组相联;设置每个set不止一组,就可以在一定程度上降低它的conflict miss的概率;每次也是先找index,再对tag; (一组上的各个block也叫cache line)
-
怎么写?
一般采用写分配和写回两个策略结合,这两个策略分别对应miss和hit;
写回(write through)是如果在写的时候hit了,就给当前的cache写一个dirty位,先不着急写回,直到这个块要被替换时再将其写回;
写分配(write allocate)是如果写的时候miss了,那当然要在低一级的cache中找找,直至找到它后,再把它写回高一级的cache(越接近CPU认为级别越高);
那么,会出现一种很麻烦的情况:当我想写一个内存时,L1 miss, L2 miss,L3 hit, 把对应的块写分配给L2,发现没有空余位置,于是替换,又发现替换的那个是一个dirty位为1的,那还得先把它写回L3 ,(如果L3又没位置,还是要进行一样的替换操作);数据写到L2,再找L1中的空闲位置,如果又是没位置,还得换,又要考虑写回的事情;直到把这块内存写到L1,再将dirty位置1。
在cache lab 实验中,使用了这样的包含性策略来实现一个三级cache,这个包含性策略要求高一级的cache必须是低一级的子集,不能出现:某内存存在于L1,但在L2中没有。这种策略同时也保证了写回是100% hit 的。这样的包含性策略还默认了写操作总是在L1上进行的,如果L1 miss,就先加载到L1,再写。
-
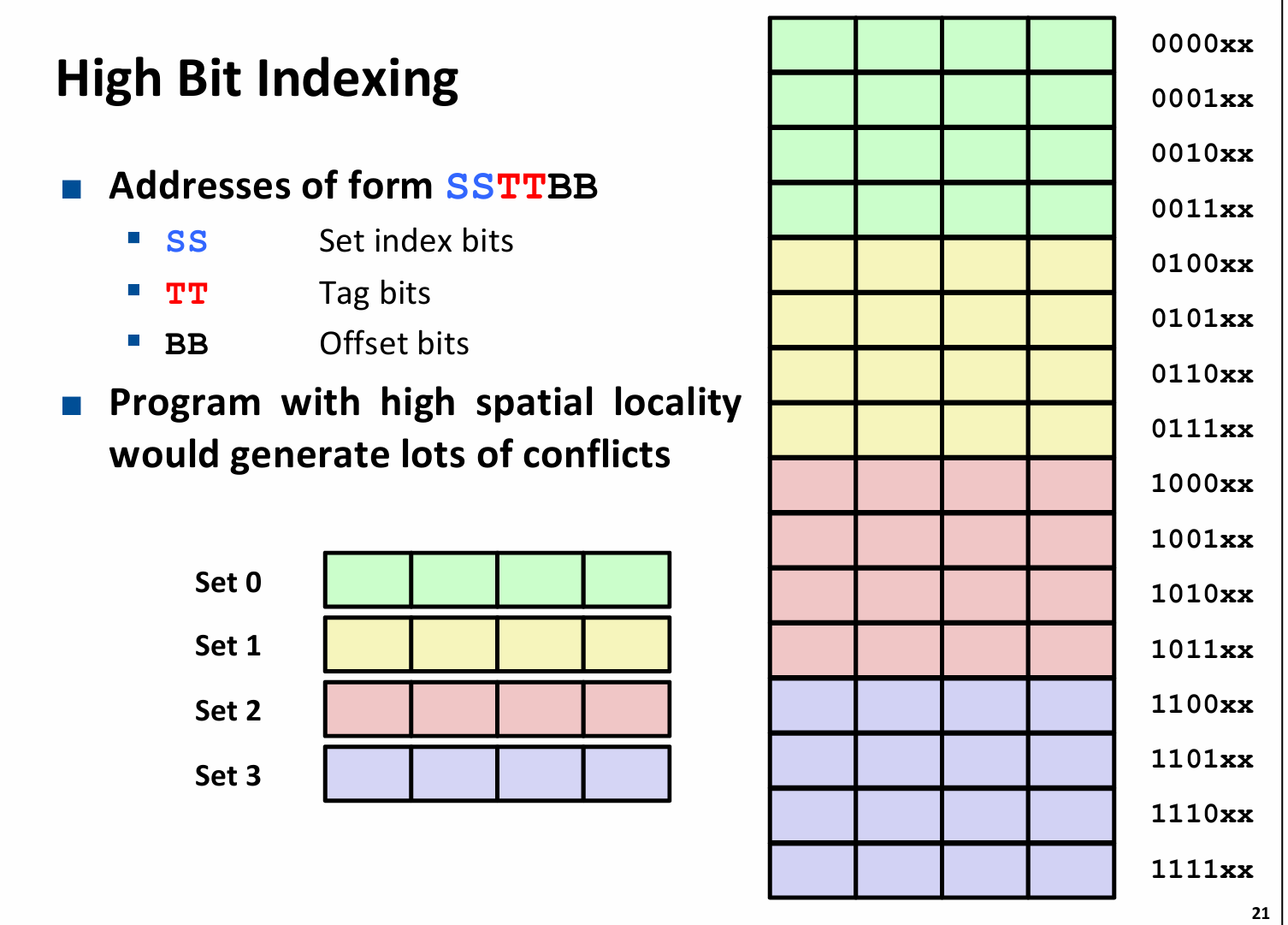
为什么index是在中间而非在最前面?
这实际上是为了避免因为“良好的空间局部性”导致过多的conflict miss,注意到在index设置在高位时,几个连续的主存块都被映射到同一内存块。
-
为什么cache是有效的?
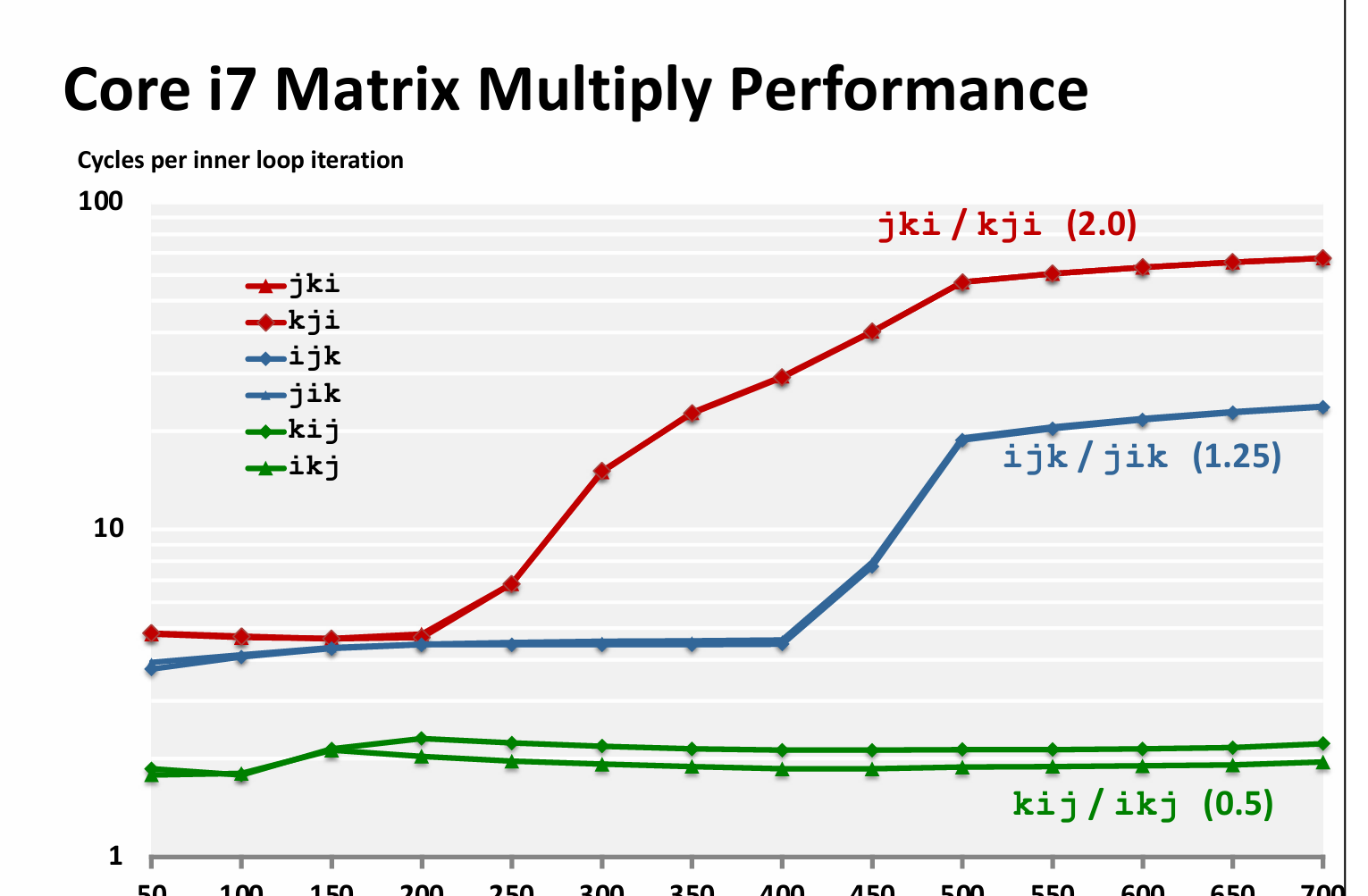
时间局部性和空间局部性原理,一个良好的程序通常会对一个数据(指令)多次访问,或者对一块连续的内存(指令)进行访问;cache取出的数据,很有可能下次还会被访问,它附近的数据也还可能会被访问;那么访存的速度,就从原来访存DRAM的速度变为了访存 SRAM 的速度.
-
一个结论:矩阵乘法的良好顺序是 kij 或者 ikj
虚拟内存¶
虚拟内存和cache的实现具有一定的相似性,其目的也有相似性:磁盘和内存间ms级的延迟是难以接受的;通过虚拟内存实现了对主存的高效利用;
同时,虚拟内存不止实现了主存和磁盘之间的缓存关系,还作为了储存器管理和保护的工具;
具体来讲,虚拟内存可以为每个进程设置一个很大且线性的内存空间,同时又保证了各进程的物理内存不冲突;也避免了对主存利用的碎片化;
通过页表管理内存,也使得某些内存得以被共享;更为重要的是虚拟内存实现了链接和加载的简化,因为在虚拟内存的视角,代码区的起始位置,栈的起始位置都是被固定的;
虚拟内存还实现了对存储器的保护,我可以设置页表某些项为可读、可写、可执行来控制对这些虚拟页面的访问;
地址翻译¶
地址的翻译是由软硬件共同协作完成的。
硬件上,芯片中的MMU接收CPU提供的虚拟地址VP,先查找快表TLB,TLB是一个类似于cache的多路组相联结构,其中存储了最近访问的页表项,根据局部性原理,TLB的miss率相对较低,这是因为每个页表项对应着4k的页,假设TLB仅存在一条页表项,每1000次会换一次表,那么miss率应该是1/1000,因而多数时候,仅通过TLB就可以获得对应的物理地址。
上面的内容并没有解释全面,接下来先说页表及其访问,再说明完整的机制实现过程。
当TLB miss 时,MMU会根据页表基址寄存器提供的页表基址的物理地址(讨论先假设是一级页表)+VPN(是VP的一部分)获得对应的页表项,这里面存储了PPN,利用PPN和VPO(它也是物理页的偏移量)拼起来,就得到了物理地址PP,接下来就可以套用cache的访问来进行了,即先访问L1 cache….
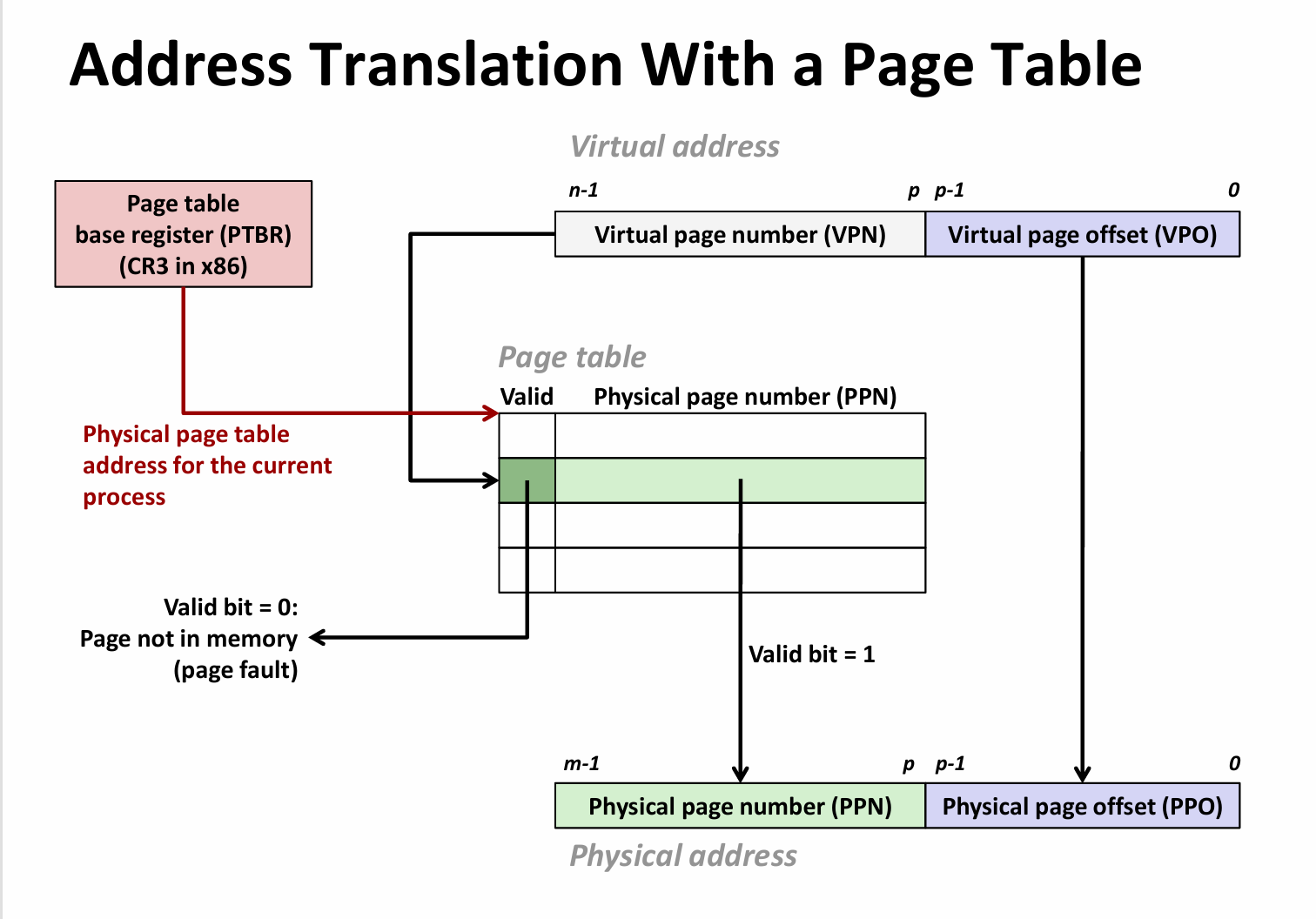
以上讨论只说明了页表的hit的情况,当查找不到对应表项(即valid是0),有以下几种情况:
- 这是一个错误地址,比如数组越界,比如访问一个没有声明的指针等,触发段错误,导致进程终止;
- 由于按需分配的机制,分配的内存并没有立即拉入主存,直至第一次访问时,触发page fault,操作系统会处理这个错误,如果主存未满,则分配空闲页,如果主存已满,就选择一个victim换入swap区,再分配腾出来的内存;
- 如果访问的内存是被换到了swap区,那就将其换回。
从这里也可以看到虚拟内存实现的类似cache的操作,只不过特殊的是,磁盘和主存是一个全相联的关系,即磁盘中的某一页(虚拟内存的某一页)可以被映射到主存中的任何一页。当主存已满时,就进行换出换入。
接下来补充TLB的内容,由于TLB是一个组相联的类似于cache的结构,对它的访问,是将VPN拆成TLBt,TLBi,也就是tag和index,查找和cache类似。
多级页表:虽然单级页表能够快速查找到物理地址,但由于现代计算机的地址空间很大,在主存上根本无法存储如此多进程的如此多页表,那么就使用多级页表作为妥协,多级页表可以省空间的原因是如果某一块是空的话,就设定其指向的指针为NULL,那么这一块所有的页表项都不用存储了。
优化¶
machine independent 优化
code move (把重复的操作移出循环)、为指针操作创建别名,即临时变量,防止编译器对内存的大量读写, 死代码消除、内联函数
我们为什么要这么做? 编译器的优化有限,在可能出现问题时,它的操作是保守的;
为什么叫做机器独立优化? 这些优化操作是不需要硬件的特殊机制做支撑的。
Machine dependent 优化¶
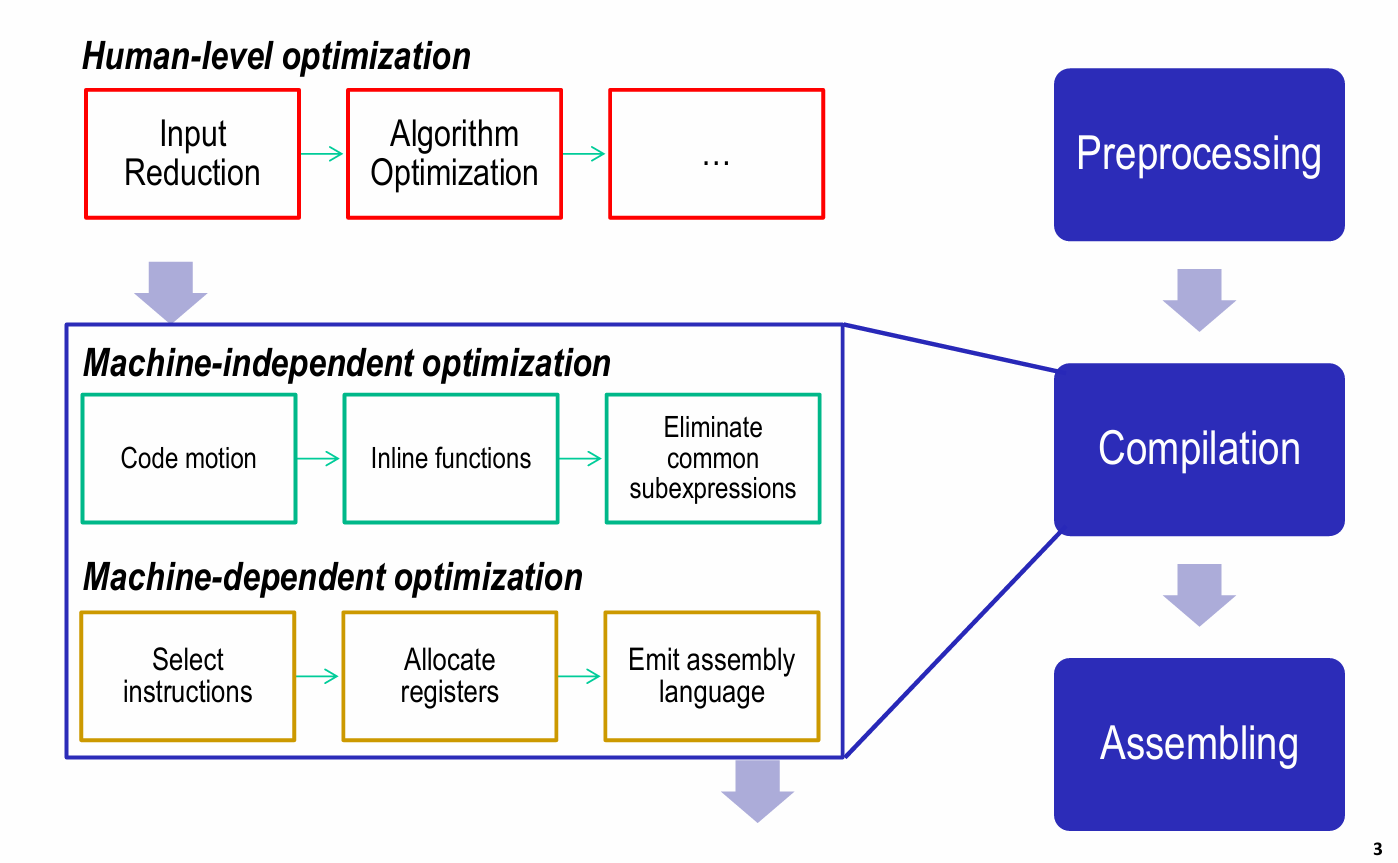
机器依赖的优化上,主要有流水线,并行化,分支预测等;
流水线把单个机器指令的实现拆解成几个部分,在某个数据第i个stage处理完之后,就可以将下一个数据送入,这样的流水线在顺畅运行的情况下可以将CPE减小到1;这是因为在流水线充分运转时,每个周期都有数据运算完成;通过多条流水线的共同运行,CPE可以继续减小,这就需要硬件计算单元数量的增加,注意,这样的增加受限于流水线过程中数量最少的那个单元。
为了充分利用机器的性能,常见的处理方式是扩大并行,即使用循环展开。
链接¶
- 符号解析:将所有引用绑定到唯一的定义上,定义分为强、弱,初始化的或者已经写好的函数是强定义,未初始化的变量或者函数的声明是弱定义;不能存在两个强定义的全局变量或者函数;当存在两个弱定义的全局变量时,链接器任选一个作为声明;当存在多个弱定义和一个强定义时,弱定义指向强定义;
- 重定位:链接器先为合并的目标文件的所有段确定虚拟地址,然后利用重定位表,将每一个表项(text段或者data段)一般是地址或者全局变量值,进行确定;地址可以使用绝对地址和PC寻址;
- 静态链接:静态库.a文件是将很多个.o文件进行打包得到的库,链接器对可执行文件和该库进行链接时,从函数参数的第一个开始查找,那么就要注意把库放在引用库的可执行文件的后面;
- 动态链接:动态链接的重定位过程在程序加载或者运行时才得以完全执行;在静态链接阶段,仅拷贝一些重定位表项,当进入加载阶段时,再将动态库加入虚拟内存中,并进行重定位。
进程¶
在单核CPU中,计算机在一个时刻只能运行一个进程,为了实现并发,操作系统使用了一种上下文切换的功能,将CPU的使用分割成不同的时间片,在时间片耗尽后,操作系统负责将寄存器中的值,条件码,PC,等保存在内存中,而把下一个调度的进程相应的值放回寄存器中。
进程的状态:运行、停止、挂起、终止(僵尸)
在linux中,新进程的创建只有fork这一种方式,fork实现了对父进程页表、环境变量、text段、data段、PC的全拷贝,相当于父进程的一个副本。但是一旦fork出一个新进程,两个进程的运行就会独立,看似对同名的变量进行操作,实际上是相互独立的;fork有一个特点,它返回两次,在父进程中返回子进程的pid值,在子进程中返回0;
exit实现进程的终结。不返回;
wait实现对子进程的回收,它是一种阻塞式回收,直到操作系统调度到父进程,并且发现在僵尸进程队列中有其子进程时,父进程执行回收,wait需要一个int 指针,可以接收子进程的返回信息;
waitpid实现对特定子进程的回收;
异常控制流¶
CPU实现的上下文切换的底层就是异常控制流;所谓控制流就是CPU的执行顺序;
异常分为以下几种:1.异步中断;2.同步fault(可恢复)、3系统调用(也叫trap),4.错误;
后面三种均为同步;
接下来以系统调用为例说明:常见的系统调用比如write、read、fork、exit
在c开发者的角度来看,系统调用的实现和普通函数调用差别不大,但事实上,系统调用:由内核执行,且使用了errno;还有它的权限不同;
trap和中断都会返回下一条语句,但是fault,常见的比如页中断返回到当前语句;
shell的实现:shell进程通过fork创建子进程,再通过execve将原代码段、数据段、栈、堆、页表、寄存器全部“爆破”,加载进新的代码段等;此时父子进程间依然共享环境变量和文件描述符,一个典型的例子是管道实现父子进程的通信;
以shell做因子,我们考虑到一种情况,即需要子进程在后台运行,这就需要signal作为进程间通信的工具,系统有默认的中断处理函数,我们也可以自定义中断处理函数;